遠隔地に設置されている公共設備には、日常点検に時間がかかるという課題がある。特に、災害時や障害時に技術者が現場に立ち入れない場合、迅速な対応が困難であることが課題だ。
また、センサーを用いて設備の異常検出を発見した際に、遠隔地から必要な復旧操作などの介入ができないことも課題として挙げられる。そこで、施設の日常点検や災害時・障害時における迅速な対応を見据え、自動・遠隔操作が可能なロボットによる遠隔監視の検証にセンシンロボティクス、扶桑電通が共同で参画した。
ロボットを用いた実証実験

センシンロボティクスがインターネット環境を用いた遠隔操作や自律走行を実現するロボットを構築し、扶桑電通提供のアームロボットと組み合わせて提供した。適切なロボットの選定、アームロボットへの搭載、システム統合などの技術面で支援を行い、ロボットにアームロボットを組み合わせることで、自律走行による現場巡視だけでなく、必要に応じてアームロボットを活用した復旧操作も可能だ。
この実証を通じて、多様な設備の点検が効率的に行えることが確認された。特に、定期的な保守業務や障害時における一時切り分けを遠隔でおこなうことで、人的リソースの削減と点検精度の向上が実現した。
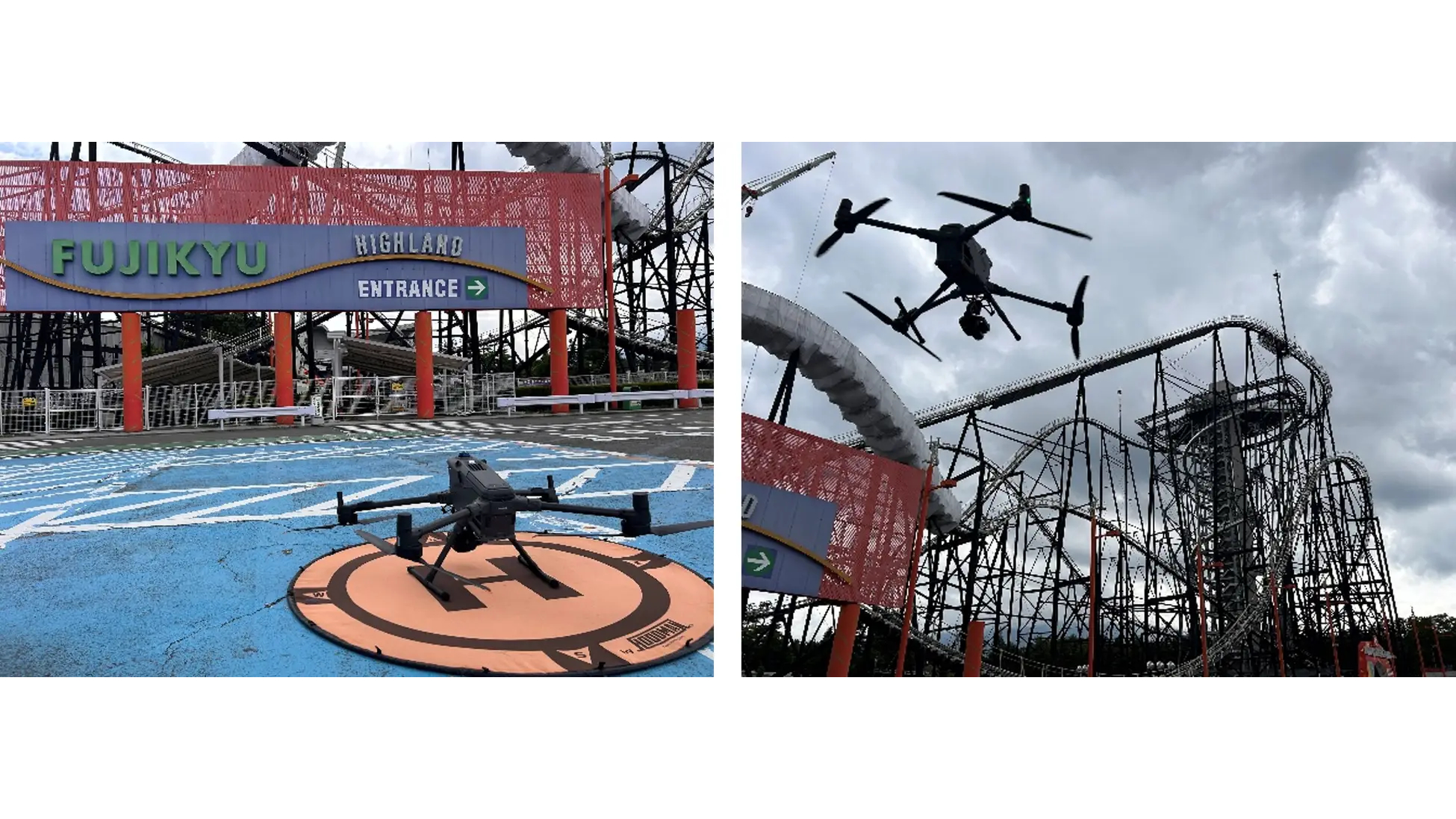
ドローンを用いた実証実験
非GPS環境下での屋内飛行が可能なドローン(Skydio機)を活用した。
センシンロボティクスのこれまでの現場で得た飛行技術やノウハウを活かして、扶桑電通へ研修などの導入支援および、飛行の難易度が高い狭小部や、螺旋階段がある現場での飛行サポートした。
この実証によって、遠隔からの簡易的な操作で、操作者の技量に関係なく自律飛行による計器類のデータ取得や、有事の際の初動調査に活用できることを確認した。また、リアルタイムのデータ取得により、異常を確認できた際には即座に対応可能だ。その結果、障害時の設備ダウンタイムを最小限に抑え、効率的な運用を実現した。

センシンロボティクスと扶桑電通は、本取り組みで得た知見をもとに、引き続き協力し、設備点検の省人化・効率化・迅速化の実現を目指す。ロボットにおいては、自律移動時の正確性および安全性の向上、遠隔操作時の操作性のさらなる高度化に取り組み、ドローンにおいては、取得した計器類や設備外観のデータをAI分析システムで解析し、人間の目では見落としがちな小さな異常を早期に発見することで、保守作業のさらなる効率化が可能だ。これらの改良やAIの活用を通じて、DXによる設備点検の高度化を推進していくとしている。