


着実に進むスワームロボティクスの進化
「スワームロボティクス(Swarm RoboticsあるいはSwarming Robotics)」と呼ばれる分野がある。「スワーム」とは群れ、特に無数の昆虫が集まって行動している姿を指す。たとえば検索エンジンでswarmを検索してみると、ハチの群れを写した画像がいくつも表示されるだろう。そして「ロボティクス」とはロボット工学を意味し、スワームロボティクスとは、複数の(特に大量の)ロボットをひとつの群れとして制御する技術を指す言葉である。
- Advertisement -
たとえば次の映像は、スワームロボティクスに取り組む企業のひとつであるAPIUMが公開した、「水中ドローン」のデモンストレーションだ。最長7キロメートル航行可能な90機の水中ドローン(データ収集機能が内蔵されている)が3日間にわたって運用され、運用と回収が問題なく行われたそうである。
「スワーム(群れ)」として運用されるAPIUMの水中ドローン
このようにさまざまなロボットでスワームの研究が行われているのだが、ご存知のようにドローン(drone)とは、雄バチを意味する英単語だ。だからというわけではないが、ドローンすなわちUAVを対象としたスワームロボティクスについても、既に多くの研究が進んでいる。
- Advertisement -
たとえばスイス連邦工科大学(ETH)はこの分野でさまざまな研究成果を発表しており、いまから6年前の2012年、3機のドローンがネットを使って巧みにボールを操る映像を公開し、注目を集めている。
スイス連邦工科大学チューリッヒ校が開発した、ボールを投げてキャッチするドローンの群れ
また本連載のVol.14でも触れたように、米軍もドローンスワームの開発に取り組んでおり、「CICADA(セミ)」や「LOCUST(イナゴ)」といったコードネームの研究が進められている。このうちCICADAは、推進力を生み出す装置を持たず、高高度から大量にばら撒かれて地表に到達するまで情報を集める。つまり「群れを制御する」というよりも、「数撃ちゃ当たる」方式というわけであり、ドローンスワームという領域の多様性を示すものと言えるだろう。
こうした研究だけでなく、既に実用段階に入ったドローンスワームも存在する。そのひとつがエンターテイメント用ドローンで、2018年冬の平昌オリンピックで、インテルが1218機のドローンを使って行ったデモンストレーションが記憶に新しいところだ。
平昌オリンピックで披露されたインテルのドローンスワーム
- Advertisement -
1,218機のドローンを使用したことで、このパフォーマンスは当時、「無人航空機による最多同時飛行のギネス世界記録」に認定された。「当時」と書いたのは、残念ながらこの記録がすぐに破られてしまったためだ。そのたった数か月後、中国のドローンメーカーEHang(人が乗れるドローンタクシーの開発に取り組んでいることで知られる)が、1,374機のドローンを使ったパフォーマンスを行ったのである。
EHangによる1374機のドローンスワーム
このように飛行の複雑さや目的に差はあれ、大量のドローンを同時飛行させるという発想は、実用段階に入ろうとしている。これに新たな局面を加えようとしているのが、お馴染み米国のDARPA(国防高等研究計画局)だ。
DARPAが進める「OFFSET」プログラム
DARPAはさまざまな形で、ドローンスワームの研究促進と実用化を後押ししている。たとえば2017年4月には、陸軍士官学校など米軍内の3つの教育機関と合同で、Service Academies Swarm Challengeという3日間の競技会を開催している。これは各参加チームに40機のUAV(回転翼型と固定翼型それぞれ20機ずつ)と、それらをドローンスワームとして制御するソフト類を提供し、敵味方にわかれて競わせるというものだった(相手エリアに設置された目標地点に何機のUAVを着陸させられるかなど、スワーム対スワームの模擬戦が実施された)。
DARPAが開催したService Academies Swarm Challenge
そしていま、DARPAが取り組んでいるのが「OFFSET」プログラムだ。これはOffensive Swarm-Enabled Tactics(攻撃型スワーム対応戦術)の略で、その名が示すように、スワームロボティクスを使った新たな戦術の確立を目的としている。
OFFSETはService Academies Swarm Challengeと異なり、企業や研究機関に向けた公募型のプログラムで、「スプリント」と呼ばれる短期間のアイデア募集・選定が5回繰り返されることになっている。そこで最終的に目指されているのは、実に250機以上の自律型ロボットによって構成されるスワーム。そのための基礎技術を確立し、さらに大規模なフィールドテスト(3Dの仮想空間内でのテストと、現実空間内でのテストの両方)を行うことが予定されている。
各スプリントには具体的な状況と目標が定められており、現在開催中の第3回スプリントでは、小規模な部隊が100機のロボットを操って、1~2時間かけて都市の一部を奇襲するというシナリオが設定されている。このゴールを達成する技術やアイデアを持っているというのであれば、ぜひ応募してDARPAに協力してほしいというわけだ。
それではDARPAは、ロボットのスワームをどのように捉えているのだろうか。彼らの整理には参考になる点が多いため、関連資料の中から一部引用してみよう。
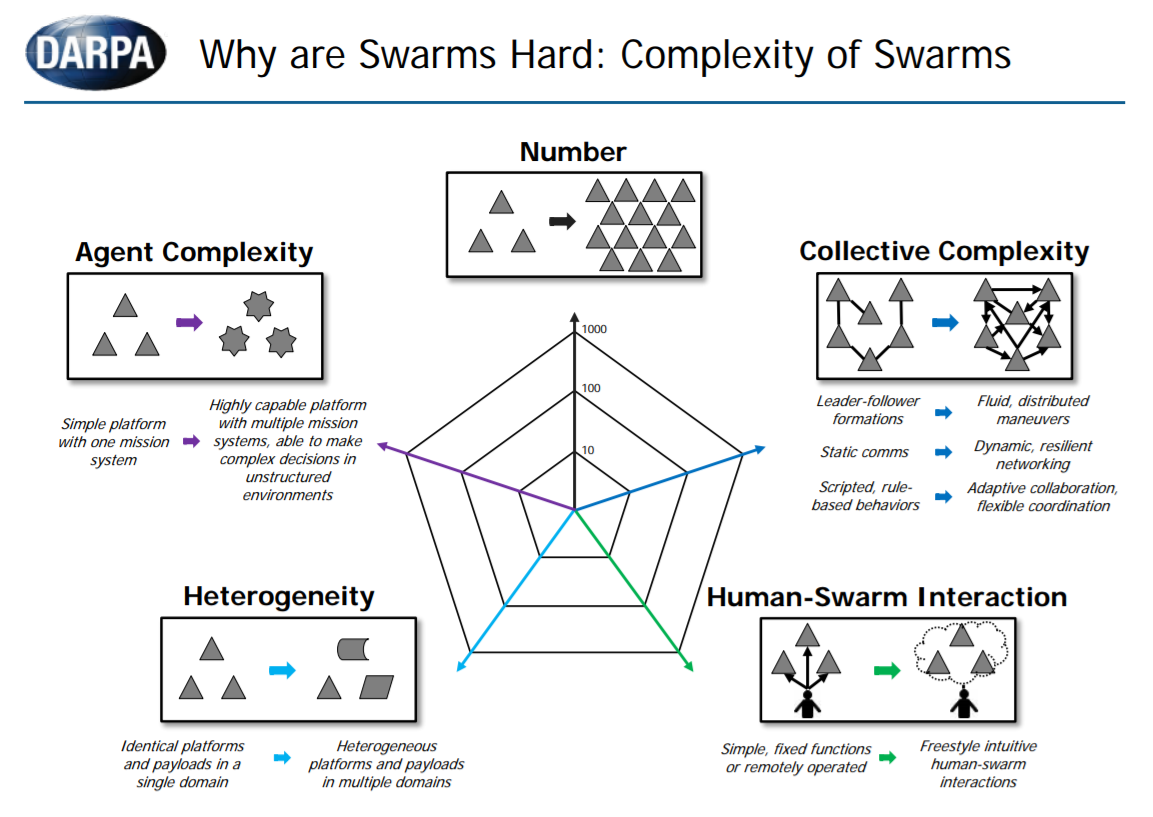
DARPAが考えるスワームの5要素(DARPA発表資料からの引用)
※画像をクリックすると拡大します
彼らはロボットのスワームが実現すべき要素を、5つに分解している。数が多いこと、個々の機体が高度な機能を有していること、多様な機体からスワームが構成されていること、機体間で複雑な関係を構築できること、そして人間とスワームのインタラクションが高度化されていることの5つである。もちろん何をスワームと定義するかは企業や研究者によってまちまちだが、DARPAが示した5つの要素は、スワームの進化を考える上でひとつのガイドラインとなるだろう。
現在行われている第3回のスプリントでは、このうち最後の要素である「人間とスワームのインタラクションの高度化」に焦点が当てられている。審査をする上で、スワームをどのように操作するのかというアイデアを重視しているのだ。

DARPAが示すドローンスワームとのインタラクションの例(OFFSET紹介ビデオより)
スワームが高度化し、群れを構成するロボットの数が増えるだけでなく、その種類が多様化したり機体間のやり取りが複雑化したりすれば、それだけ操作も難しくなる。まさか1機1機にプロポを用意しておくわけにもいかないだろう。そこで第3回のスプリントでは、高度化したスワームにふさわしい高度なインターフェースを考え、スワームと人間のインタラクションに新たな様式を生み出してほしいとDARPAは呼び掛けている。タッチやジェスチャー、あるいは音声を使って、スワームに取るべき行動を伝えるといった具合だ。
こうしたスワームの捉え方と、そのインターフェースを高度化しようという姿勢は、民間のドローン活用においても今後重要になっていくだろう。冒頭でも水中ドローンを紹介したが、スワーム化が進められているのはUAVだけではない。地上を走るロボットの群制御も重要なテーマであり、たとえば複数の「ロボットトラック」を組織して、長距離を自律走行させるという実験が始まっている。これらのロボットたちともドローン(UAV)がコミュニケーション可能になってほしいというニーズは、当然出てくるはずだ。
建設現場において、大量のUAVと建設機械が「群れ」として協力し合い、あっという間に工事を終わらせていくといった未来も来るかもしれない。そのとき現場監督を務める人間は、指揮者のようにジェスチャーで無数のドローンを制御しているのだろうか。それとも昔ながらの親方のように、大声で指示を出しているだろうか。いずれにしても、OFFSETで生み出されたアイデアや技術がこうした未来に影響を与えるに違いない。













